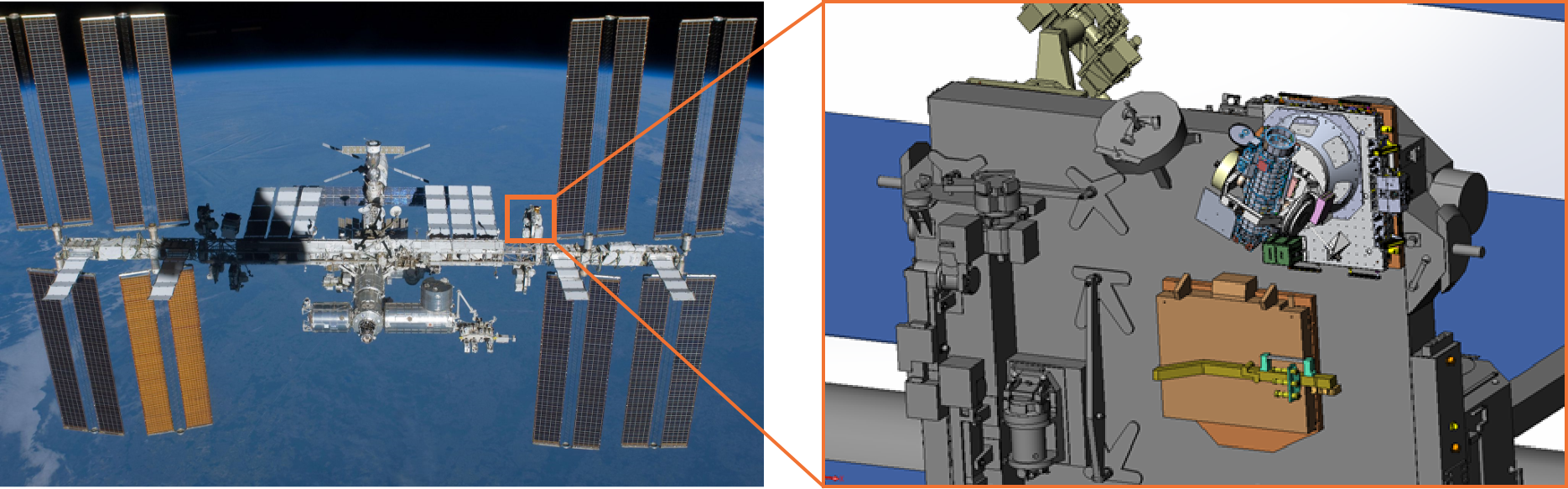
The International Space Station (ISS) maintains an Earth-orbit with an altitude of between 330 km and 425 km by means of re-boost maneuvers, and it completes 15.51 orbits per day alternating daytime and nighttime in orbital period of ~93 min. The ISS maintains a 51.6° inclination. Most of the time, ISS flies in the orientation of the ISS forward side in the velocity vecter and the nadir side in the Earth direction. The Integrated Truss Segment (ITS) provides the backbone structure for the ISS. It attaches the solar and thermal control radiators to the rest of the complex. The ExPRESS Logistics Carrier (ELC), which is attached to the ITS, can accommodate multiple payloads, and currently, there are four separate ELC sites on the ISS truss. P3 truss is located in the middle of port side ITS, and the ELC-3 is mounted on the zenith side of the P3 truss. CODEX is integrated onto a standard ELC inteface, the Flight Releasable Attachment Mechanism (FRAM) at GSFC. The maximum allowable mass on the FRAM is 226.8 kg. The FRAM also serves as CODEX’s interface to the transport vehicle to the ISS and privides survival heater power during launch operations. When the transport vehicle berths with the ISS, CODEX is then transferred robotically to ELC-3. Operations are performed by the ISS Robotics Operations System Officer (ROBO) at the NASA Johnson Space Center (JSC). The survival heaters and Phase Change Material (PCM) configuration of CODEX are designed to heat the payload preceding transfer to ensure the payload can survive the 6 hour power off transfer requirement. Once installed on ELC, operational electrical power will be available up to 750 W at 120 Vdc, and 1 Mbps Ethernet will be provided for CODEX data download. Allocated volume above the FRAM is 1.16 ×0.86×1.07 m. Once deployed, there is a risk of a failure resulting in “getting stuck” outside our nominal payload envelope. CODEX is designed to be held in place and repositioned by Extravehicular Robotics (EVR) when power is off.