편광카메라
태양 코로나의 밀도, 온도, 속도를 측정하기 위해 KAI-04070 CCD 센서를 탑재한 픽셀분리형 편광 카메라(pixelated polarization camera)를 개발하였다.
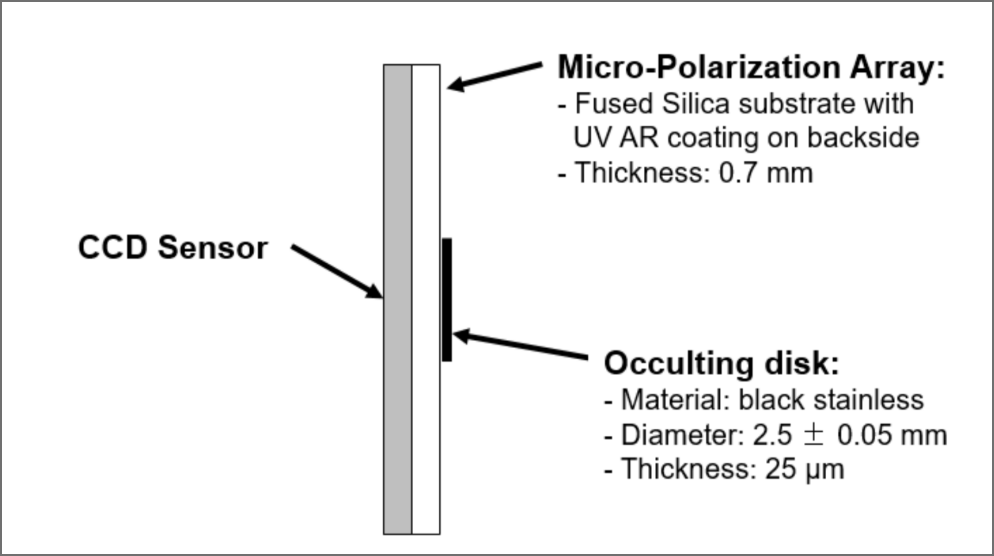
픽셀 위에 4 개의 다른 편광 성분(0, 45, 90 및 135도)을 갖는 편광 마스크 배열이 센서 위에 마운트 되어 있으며, 한 번의 관측으로 동시에 4 개의 다른 각도에서 편광된 빛을 촬영할 수 있다.
컬러 카메라가 빨강, 녹색, 파랑, 녹색의 네 가지 색상 필터로 구성된 컬러 필터 배열인 Bayer 필터를 사용하여 RGB 정보를 수집하는 원리와 유사하다.
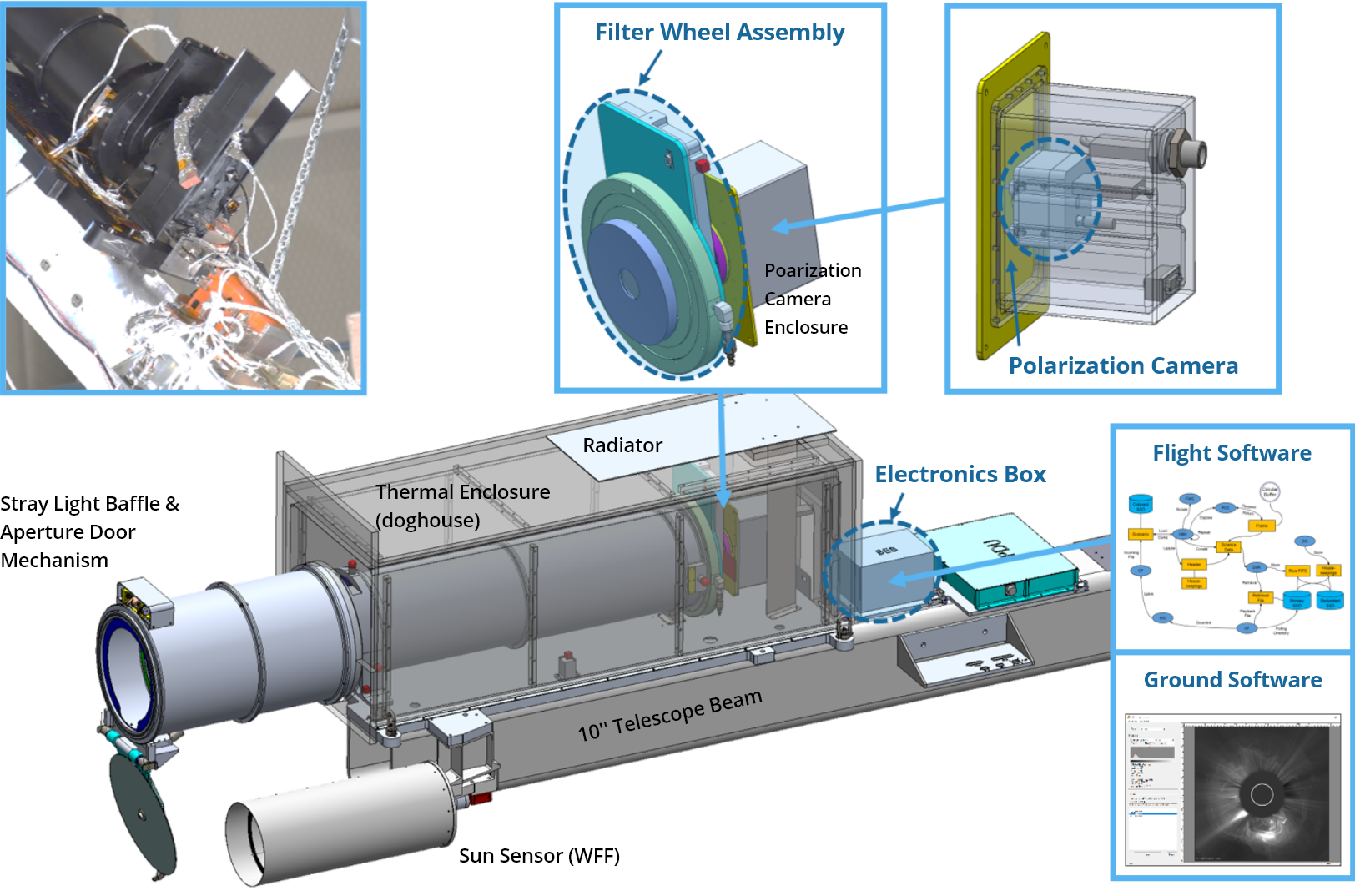
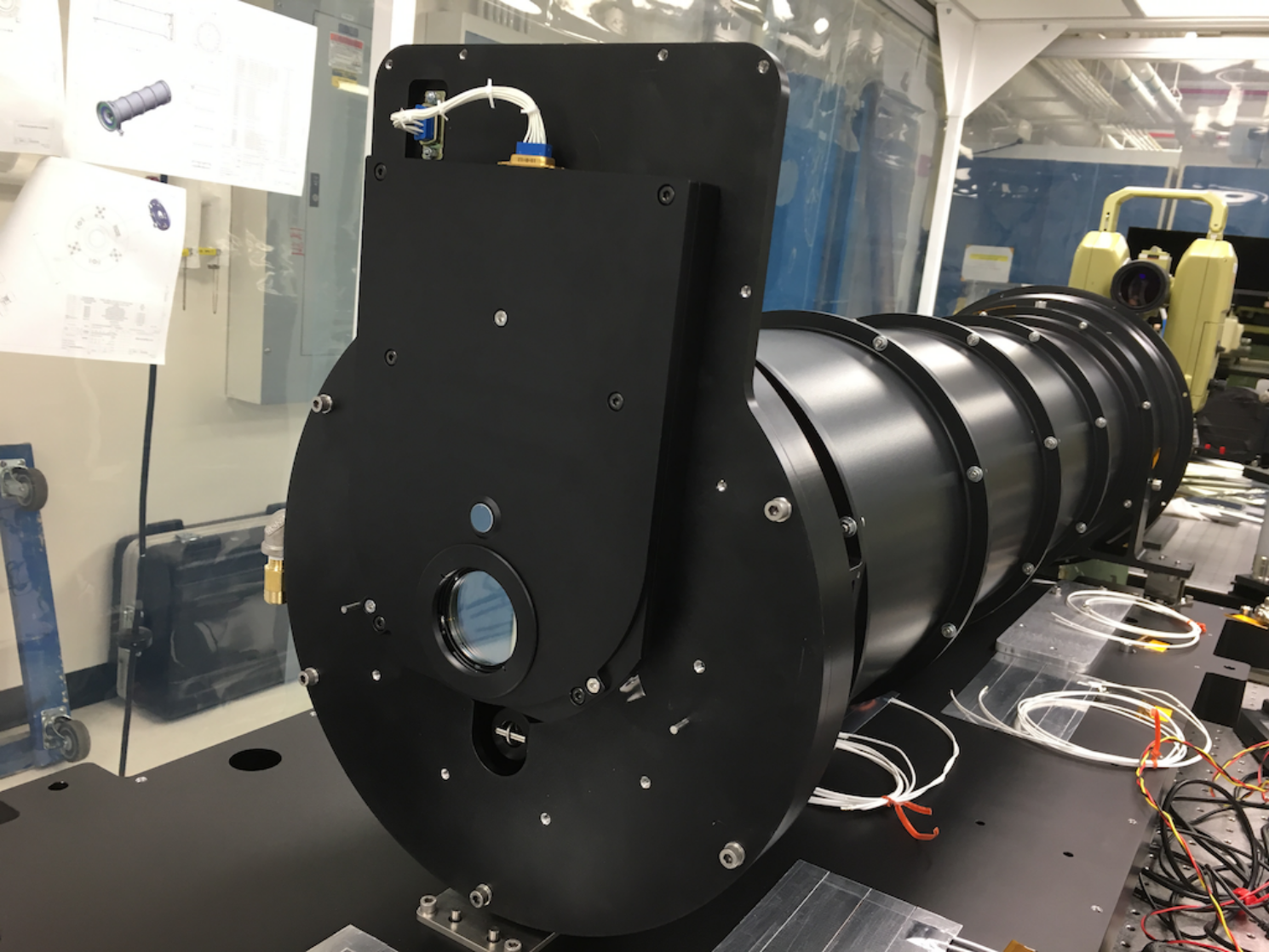
FPA(Focal Plane Assembly)는 압력 챔버와 편광 카메라로 구성된다.
CCD 센서에 장착된 픽셀분리형 편광 마스크는 진공 환경에서 사용할 수 없고, 접착 재료로 인해 운영 온도가 충분히 넓지 않은 문제가 있다.
진공 환경으로부터 보호하기 위해 1기압의 압력 챔버를 설계하였다. 그리고 열 발산을 위한 라디에이터와 너무 낮은 온도로부터 보호하기 위한 히터를 설계하였다.
CCD 센서의 온도를 모니터링하여 히터를 제어할 수 있도록 하여, CCD 센서와 편광 마스크의 온도를 섭씨 10 도로 유지할 수 있도록 하였다.
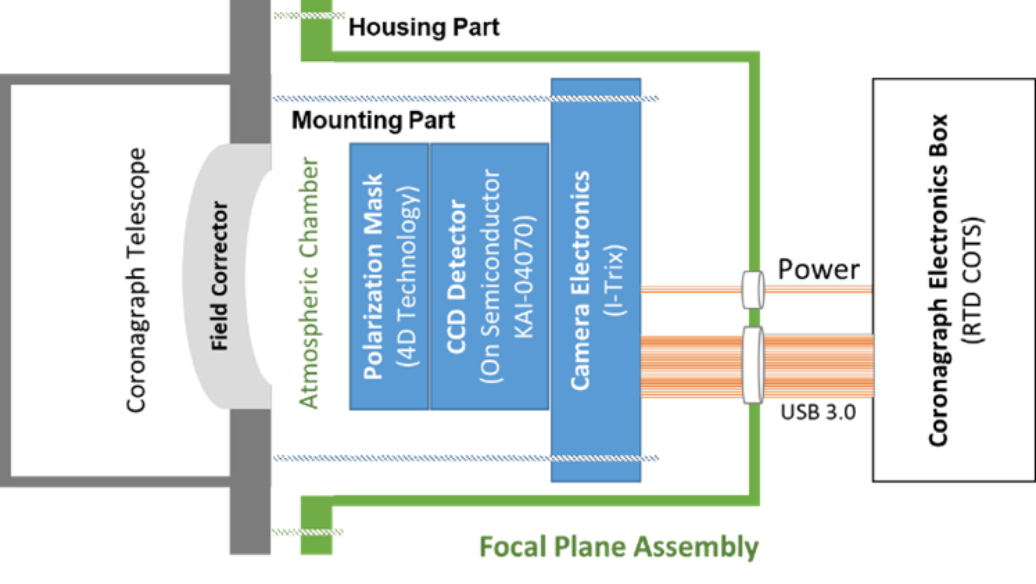
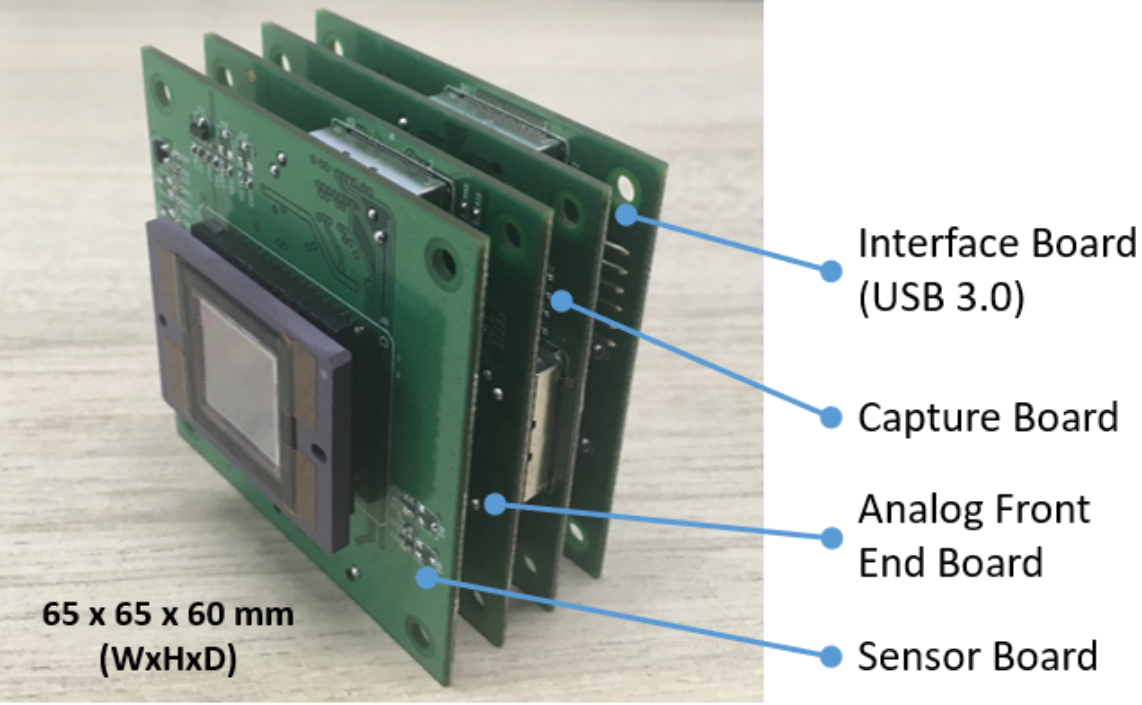
카메라 전자 보드는 센서 보드, 아날로그 보드, 캡처 보드, 인터페이스 보드 4 개의 전자 보드로 구성되어 있다. 센서 보드에는 센서 소켓이 있어 KAI-04070 CCD 센서를 마운트할 수 있도록 되어 있다. 아날로그 보드는 프런트 엔드 아날로그-디지털 컨버터 (ADC)로서 고속 디지털 카메라 구현을 위한 14 비트 CCD 신호 프로세서인 AD9978을 사용하였다. 캡처 보드는 아날로그 보드에서 이미지 신호를 캡처하여 인터페이스 보드로 전송한다. 캡처 보드의 Field-Programmable Gate Array(FPGA)는 Xilinx ARTIX 7을 이용하였다. 카메라 인터페이스는 빠른 이미지 전송을 위해 USB 3.0을 제공하기 위해 Cypress FX3을 이용하였다. 통합된 전자 보드의 크기는65 x 65 x 60 mm(WxHxD)이다.
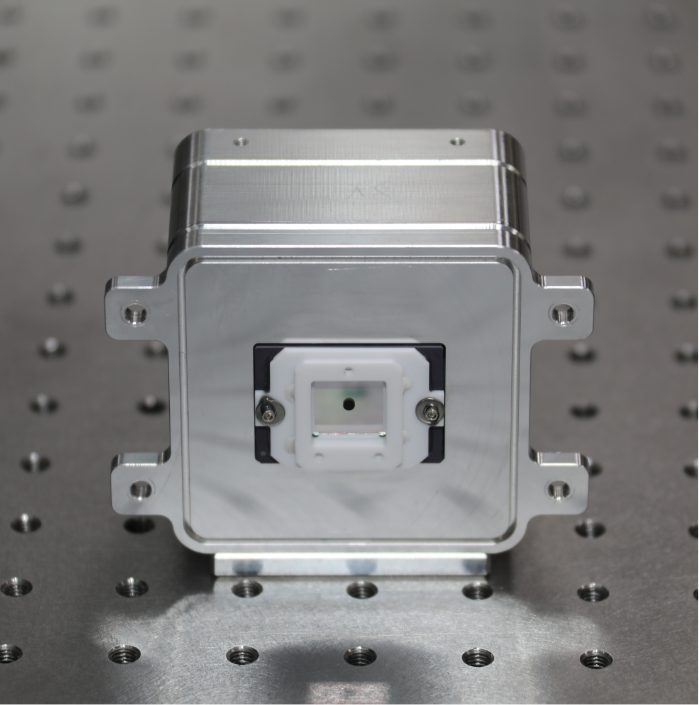
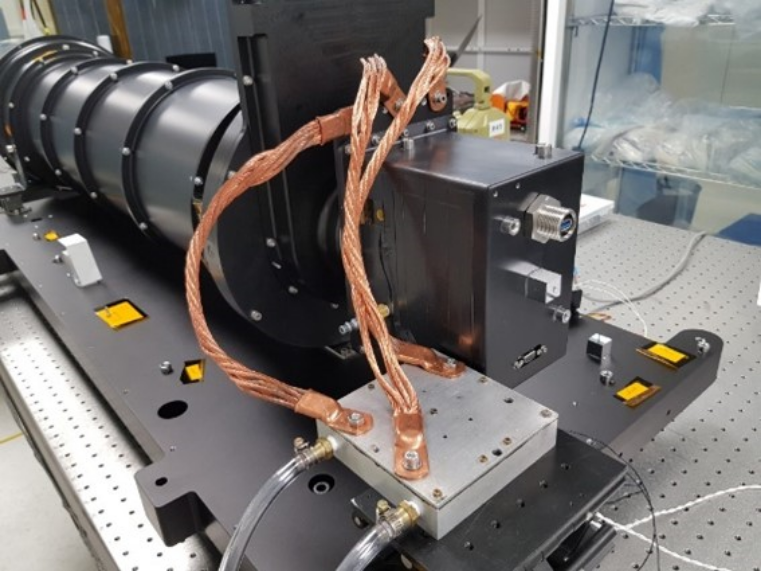
방열 구조를 고려한 인클로저를 설계하였다. 세 개의 분리된 구조로 네 개의 전자보드 사이에 세 개의 분리된 방열판이 배치되는 구조이다. 각 방열판과 센서 소자의 간극을 채월 방열 효율을 높이기 위해 방열 패드를 이용하였다. 조립 후 편광카메라의 크기는 77 x 77 x 51.30 mm(WxHxD)이다.
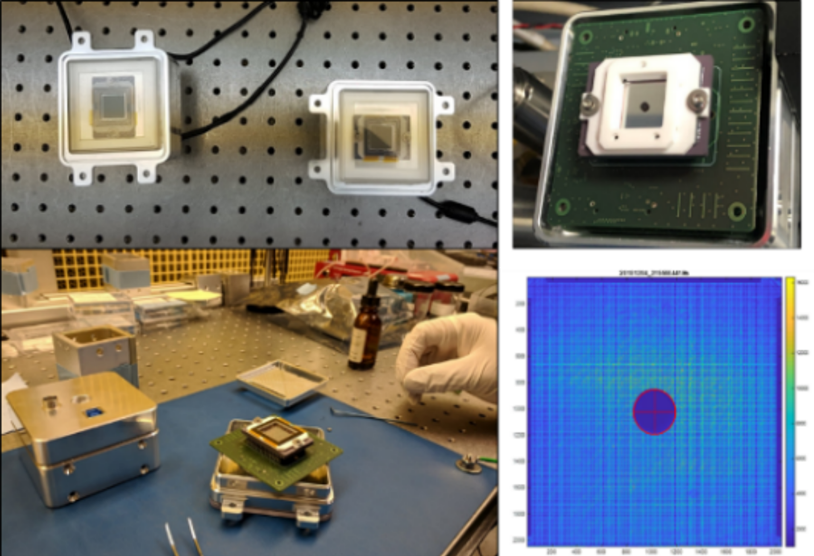
편광 카메라는 온세미컨덕터(ON Semiconductor)사의 KAI-04070 CCD 센서를 사용하였다. 센서는 상대적으로 데이터 전송율이 높은 인터라인 CCD이며, 픽셀 해상도는 2048 x 2048이다. 픽셀 크기는 7.4 x 7.4 um이고 센서 크기는 15.2 x 15.2 mm이다. 암전류 배가 온도는 포토 다이오드 7도, Vccd 9 도이다. 데이터 전송을 위한 4 개의 출력 채널이 지원되며, 최대 프레임 속도는 최대 픽셀 클럭 속도 인 40 MHz에서 28 fps이다. MPA(Micro-Polarization Array)와 차폐 디스크는 픽셀분리형 편광 카메라의 CCD 표면에 마운트하였다. MPA와 차폐 디스크의 마운트 작업은 픽셀분리형 편광 마스크 기술에 대한 특허를 보유하고 있는 미국의 4-D Technology사에서 수행하였다. 단색광(monochrome) 카메라에 MPA를 마운트하게 되면 4 개의 다른 편광 성분에 해당하는 2 x 2 픽셀이 하나의 슈퍼 픽셀이 된다. MPA 뒷면은 AR(Anti-Reflective) 코팅을 하였다. 또한 태양 반경 세 배에 해당하는 영역에서의 밝은 산란광을 차단하기 위해 3 mm 검은색 차폐 디스크를 마운트하였다.
필터휠
BITSE에서 사용된 필터휠 어셈블리의 요구사항은 아래와 같다.
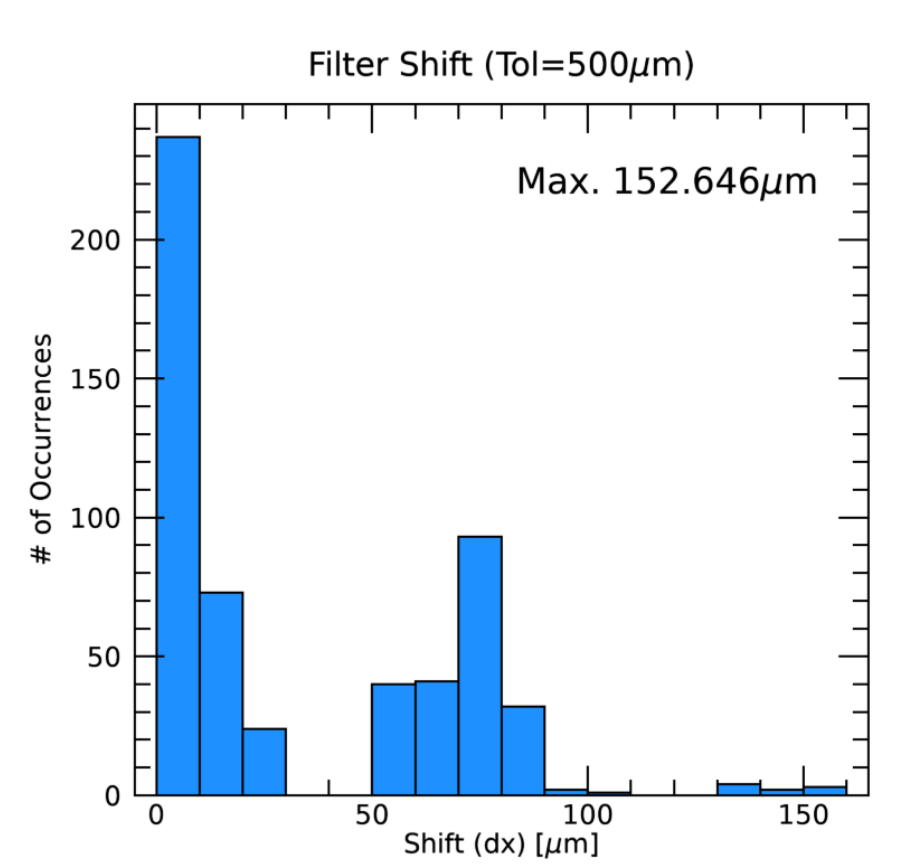
- < 0.5mm 이내의 위치 정밀도
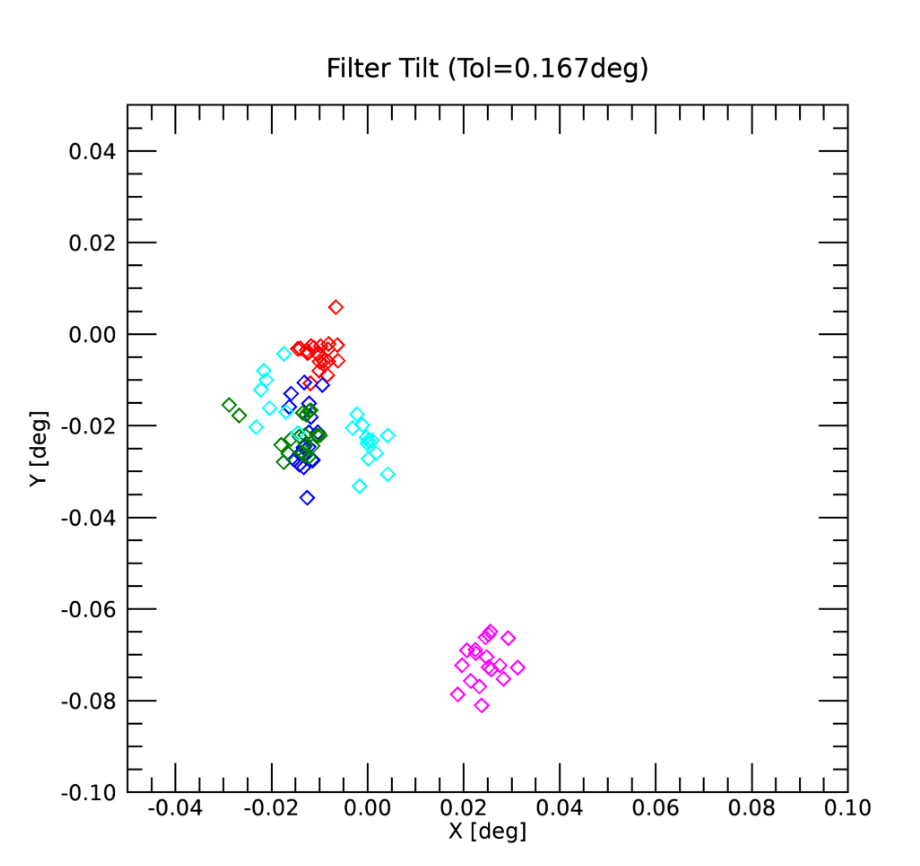
- 9각초보다 작은 틸트 정렬 및 반복 정밀도
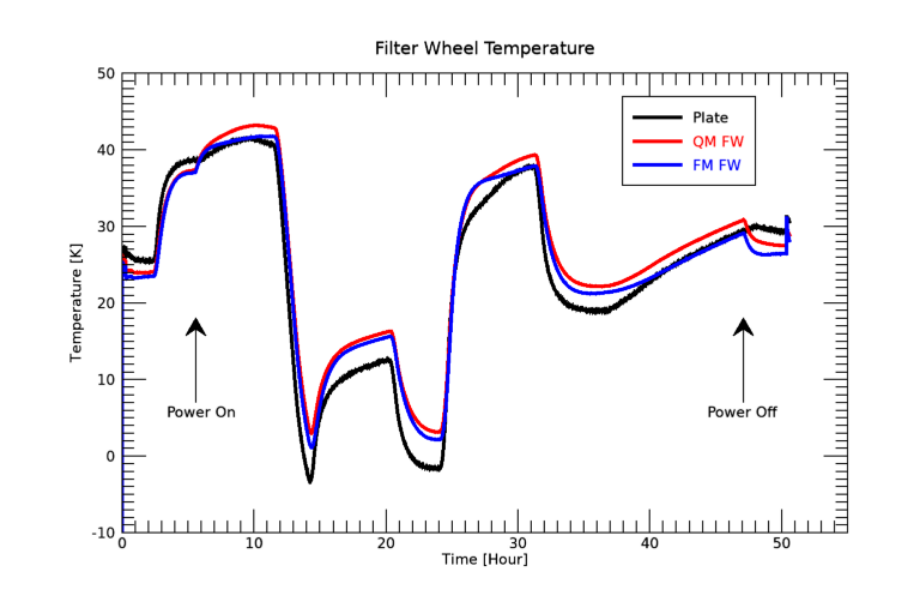
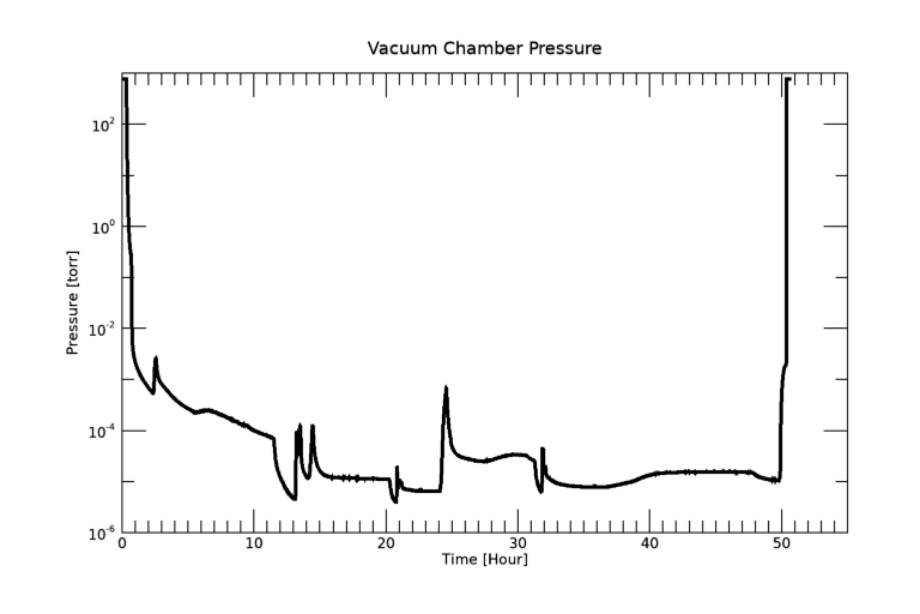
- 열진공 조건 만족 (5도 ~ 30도)
이러한 요구조건을 만족하기 위해서, 우리는 피에조 모터를 사용하기로 결정하였다.
피에조 모터는 DC모터와 비교해 구동 속도가 빠르고 위치정밀도가 좋으며 홀딩토크가 크고 소비전력이 작으며 EMI가 없는 장점이 있다.
피에조 모터는 한국의 피에조테크놀로지사에서 생산한 제품을 우주조건에 맞게 수정한 후 사용하였다.
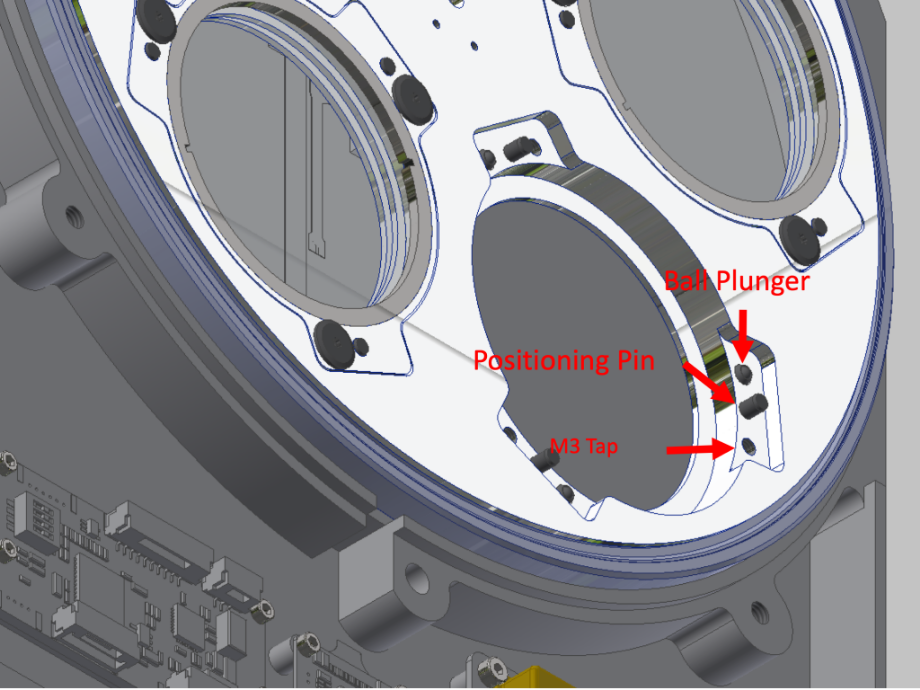 그림 1. 볼 플런저, 위치정렬핀, 나사를 이용한 각 필터의 정렬시스템
그림 1. 볼 플런저, 위치정렬핀, 나사를 이용한 각 필터의 정렬시스템
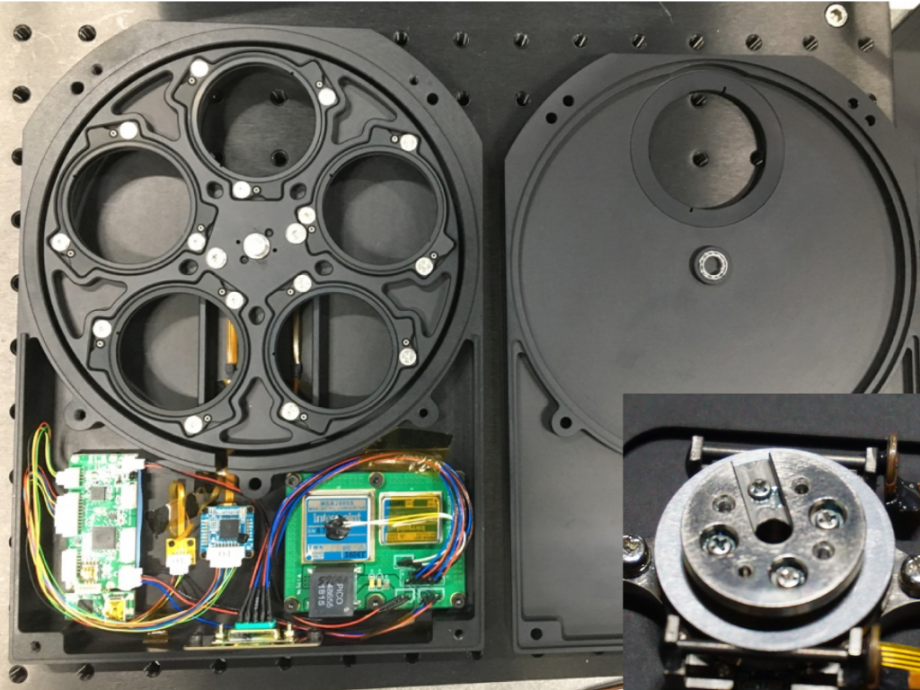 그림 2. 필터휠어셈블리의 비행모델
그림 2. 필터휠어셈블리의 비행모델
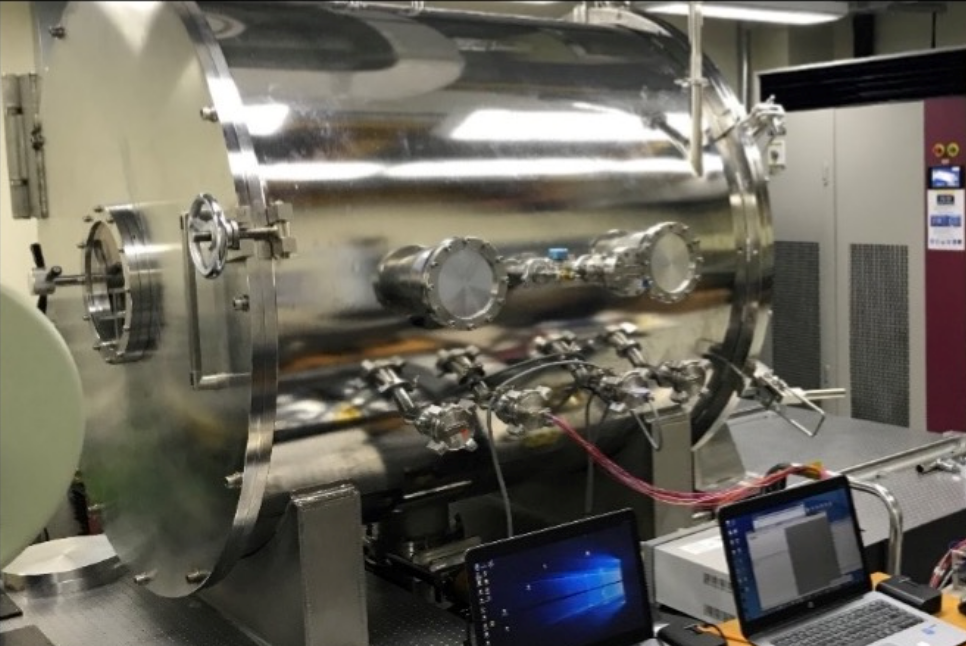
필터휠어셈블리는 0도에서 40도 범위에서 성공적으로 작동하였으며 그 위치정밀도와 각도정밀도 또한 요구조건을 만족하였다. 한국천문연원 내 챔버에서 수행된 십수번에 걸친 여러번의 열진공시험을 통해 피에조 모터의 윤활유, 회전속도, 피에조모터 진동주기, 전압 등을 우주의 환경에 맞게 세밀히 조정하였다.

성공적으로 제작된 필터휠어셈블리의 비행모델은 NASA의 GSFC로 이송되어 그림 6에서 보이듯이 필터휠 어셈블리 중앙에 부착한 정렬미러를 이용해 정밀하게 장착되었다.
비행 소프트웨어
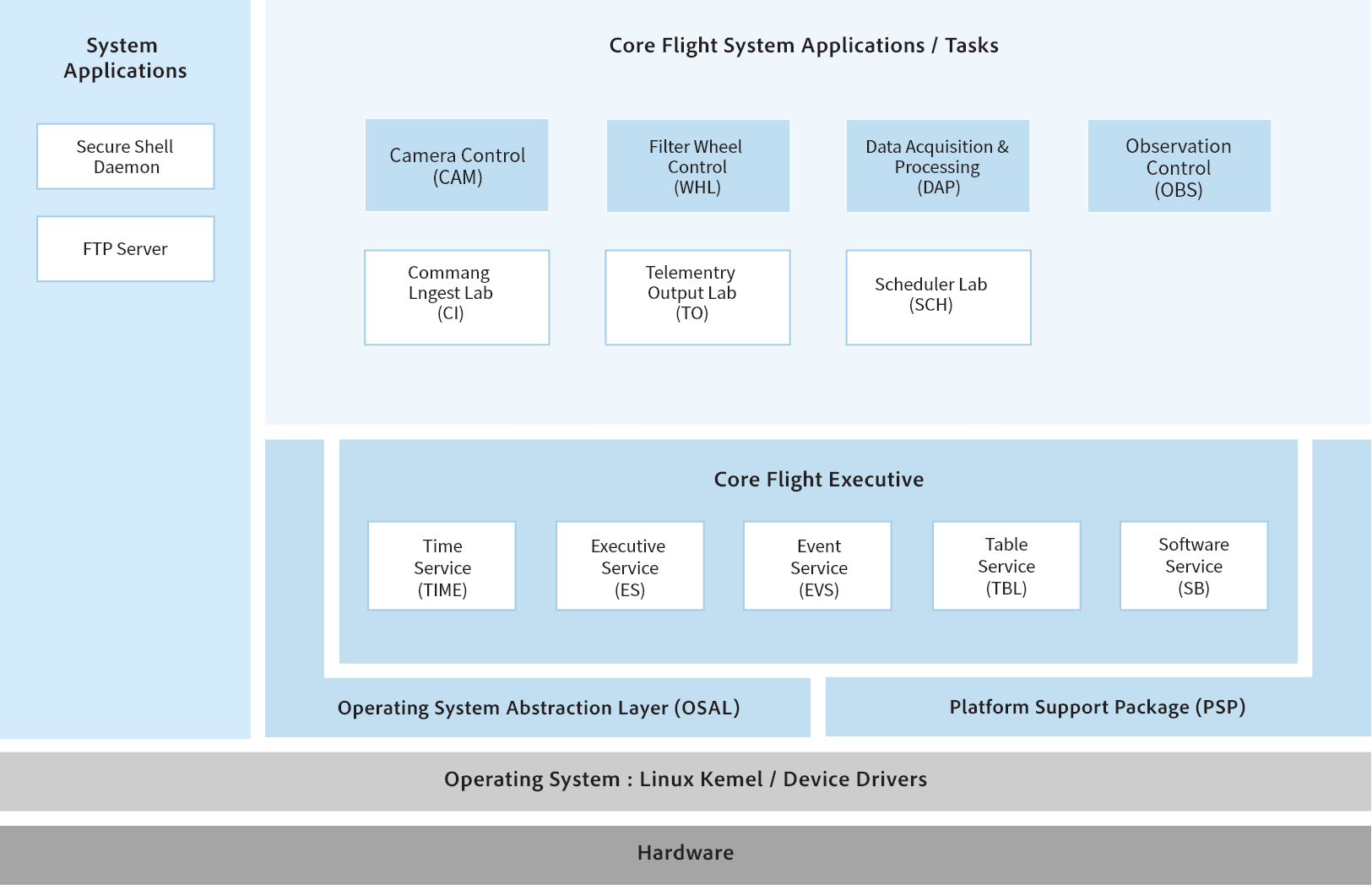
BITSE 비행 소프트웨어는 DICE 제어 소프트웨어를 확장해 개발했다.
비행 소프트웨어는 DICE 어플리케이션을 확장해 새로운 카메라와 필터 휠을 제어하고 BITSE 어플리케이션을 개발해 전원 공급 장치, 포인팅 시스템, 무선 통신 시스템과 통신 할 수 있다.
천문연은 9개의 미션 어플리케이션과 미션 운영 자동화, 데이터 처리, 시스템 리소스 관리, 소프트웨어 내결함성을 위한 7개의 재사용 어플리케이션과 통합해 BITSE 비행 소프트웨어를 완성했다.
지상 소프트웨어
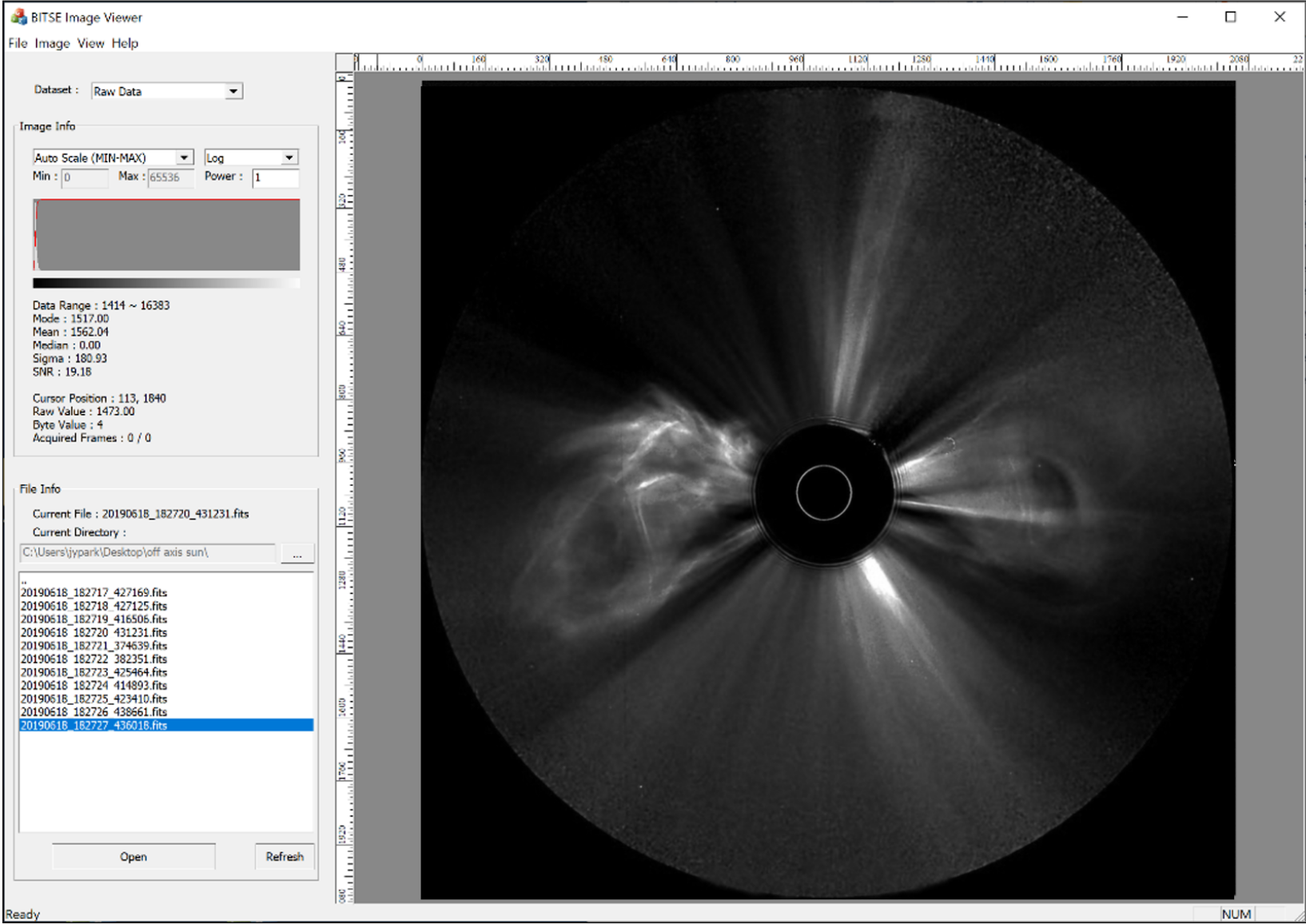
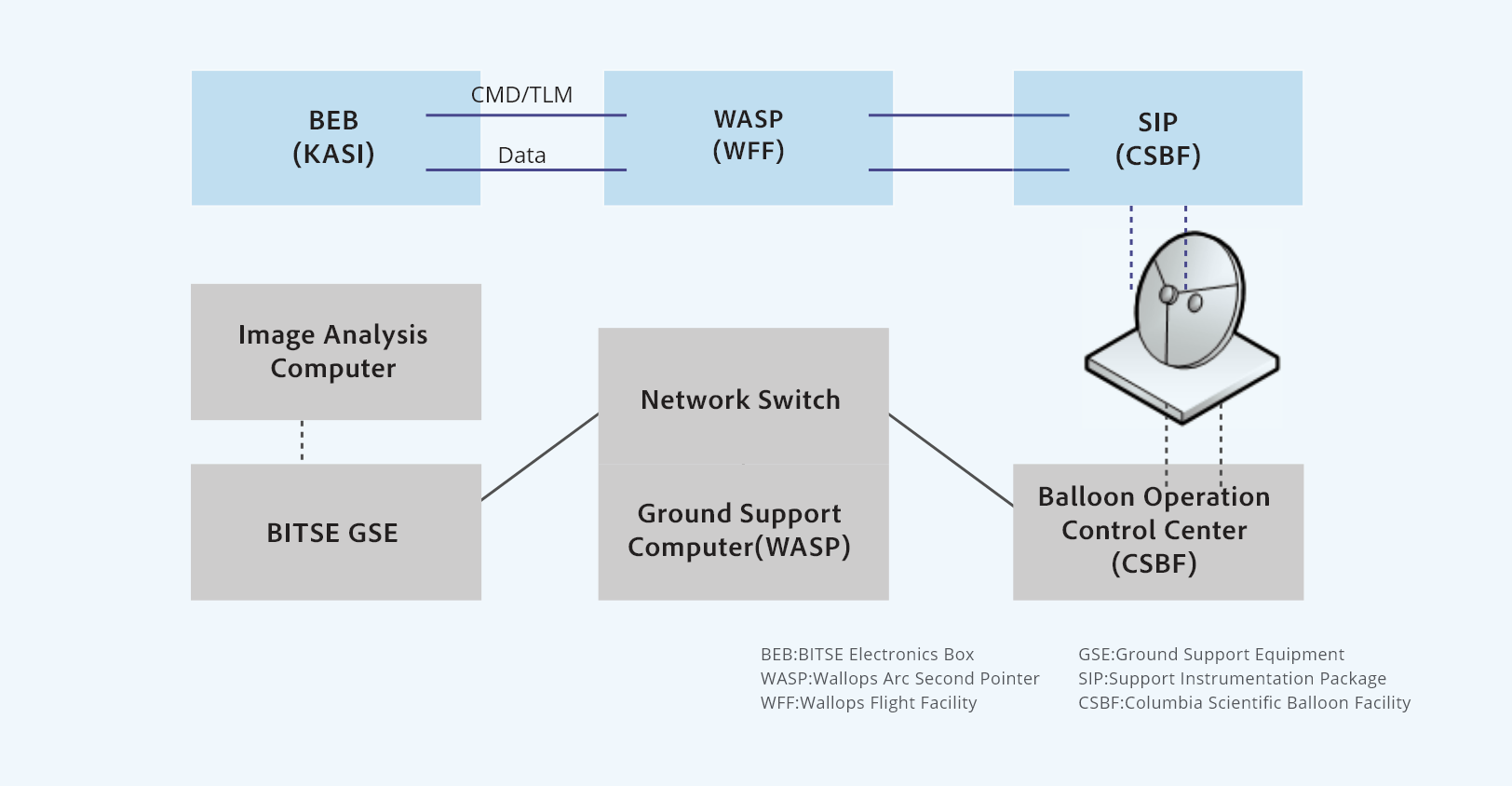
한국천문연구원은 벌룬시험용 코로나그래프(BITSE)의 지상 종합 운영 시스템(Ground Support Equiqment, GSE) 구축 및 지상 운영 소프트웨어(Mission Operation Software)와 데이터 처리 소프트웨어(Data Processing Software) 개발을 주도하고 이를 이용해 BITSE를 직접 운영하였다.
지상 운영 소프트웨어는 BITSE GSE에서 실행되는 것으로 임무 수행을 위한 명령어를 보내고 housekeeping 정보를 받아서 표출하는 역할을 한다.
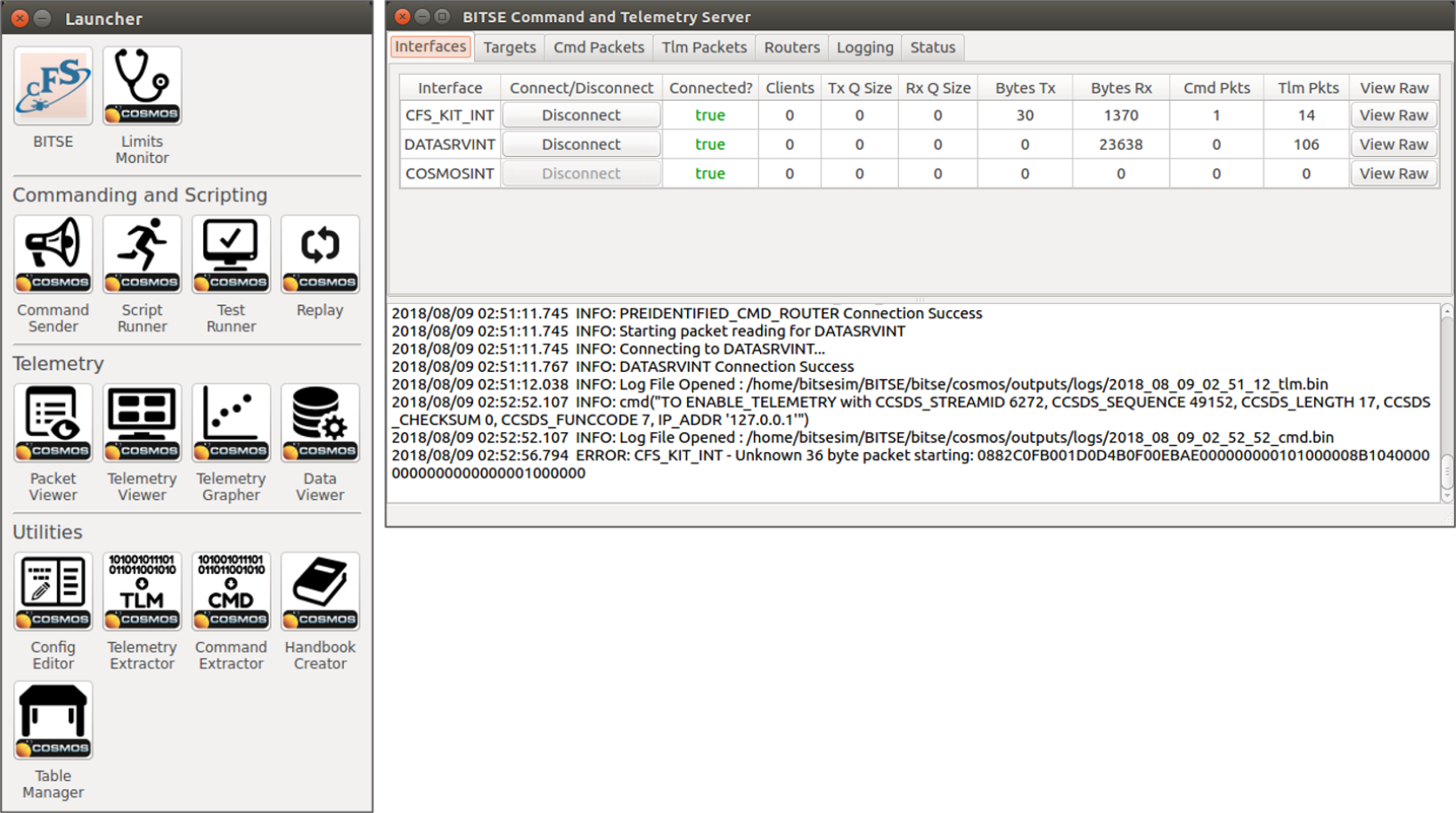
지상 운영 소프트웨어는 COSMOS로 개발하였다.
COSMOS는 embedded system의 command와 control을 위한 user interface로 Ball Aerospace에서 개발한 프로그램이다.
NASA에서 진행하는 balloon 프로젝트나 위성 개발 프로젝트의 mission operation을 위해 COSMOS를 많이 사용하고 있다.
GSE와 지상 운영 소프트웨어는 카메라 T-VAC 테스트, 코로나그래프 통합 테스트, 통신 테스트, end-to-end 테스트 등 관측기 통합 및 시험 단계부터 사용되었으며, 각 단계에서 이슈 진단과 분석을 함께 수행하였다.
또한 고고도 기구 관측을 수행하는 동안 지상에서 관측기를 직접 작동하고 통신하는 핵심적인 역할을 하여 고고도 기구 시험을 성공적으로 완료하였다.
데이터 처리 소프트웨어는 BITSE에서 받은 raw 데이터를 4 채널 편광 데이터로 나누어 저장하고 후처리(dark, flat)를 진행하는 등의 역할을 한다. 이미지 분석 소프트웨어는 관측 중에 실시간으로 편광 데이터를 분석하는데 사용하는 것으로 GSE와는 독립적인 시스템에서 구동되었다.