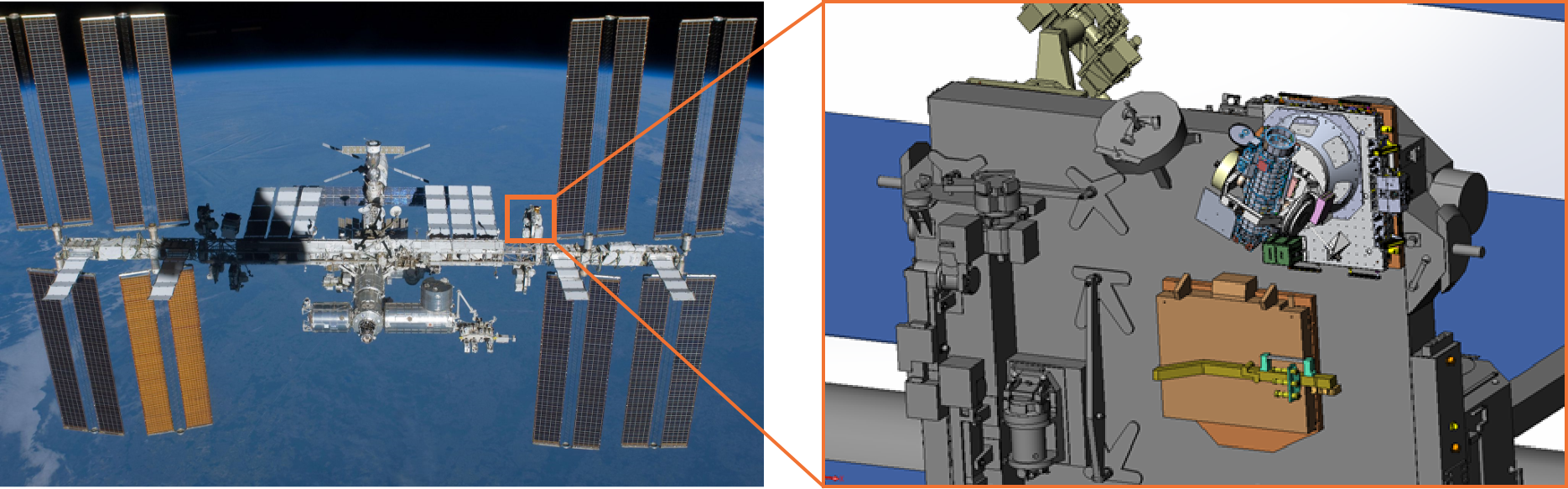
국제우주정거장(International Space Station, ISS)은 재부양기동을 사용하여 약 330 – 425 km 고도 지구 궤도를 유지한다. 약 93분 주기로 낮시간과 밤시간을 반복하며 하루 15.51번 궤도 운동을 하고, 지구와 51.6° 기울기를 유지한다. ISS는 대체로 전방이 속도벡터쪽으로 향하고 바닥이 지구쪽을 향하는 자세를 유지하며 궤도를 돈다. ISS Integrated Truss Segment(ITS)는 ISS의 뼈대구조를 제공한다. ITS에는 태양전지판과 열제어방사체가 부착되어 있다. ITS에 부착된 ExPRESS Logistics Carrier (ELC)는 여러 탑재체를 수용할 수 있는데 현재 4개의 ELC가 트러스에 부착되어 있다. ITS의 P3 트러스는 ITS 좌현 중간쯤에 위치하며 ELC-3는 P3 트러스의 천정 방향에 부착되어 있다. CODEX는 GSFC에서 표준 ELC 인터페이스인 Flight Releasable Attachment Mechanism(FRAM) 위에 조립된다. FRAM 위의 최대허용질량은 226.8 kg이다. FRAM은 ISS로 가는 수송선에서도 CODEX의 인터페이스로서 기능하며 발사 과정에서 생존열전원을 공급한다. 수송선이 ISS에 정박하고 나면 CODEX는 로봇에 의해 ELC-3으로 옮겨진다. 로봇 운용은 NASA Johnson Space Center(JSC)의 ISS Robotics Oerations System Officer(ROBO)에 의해 수행된다. 설치 과정에서 전원이 끊긴 상태로 6시간을 견딜 수 있게 하기 위하여 CODEX의 생존히터와 상변화물질(Phase Change Material, PCM)은 설치 전에 미리 가열이 이루어지도록 설계된다. ELC에 설치되고 나면 운용전력은 120 Vdc로 750 W까지 쓸 수 있으며, CODEX 데이터 다운로드를 위해 1 Mbps 이더넷이 제공된다. FRAM 위에 할당된 공간은 1.16×0.86×1.07 m이다. 배치 후 구동 중에는 이 공간 범위를 벗어나기도 하는데 그 상태에서 오류가 발생해 제어 불능 상태에 빠지게 되는 상황이 발생할 수도 있다. 그러한 경우를 대비해 CODEX는 전원이 끊기면 더 이상 움직이지 않고 멈춰진 자세를 그대로 유지하며 선외로봇(Extravehicular Robotics, EVR)에 의해 움직여져 안전한 상태로 돌아갈 수 있도록 되어 있다.